

システムデザイン研究科
所属
研究内容
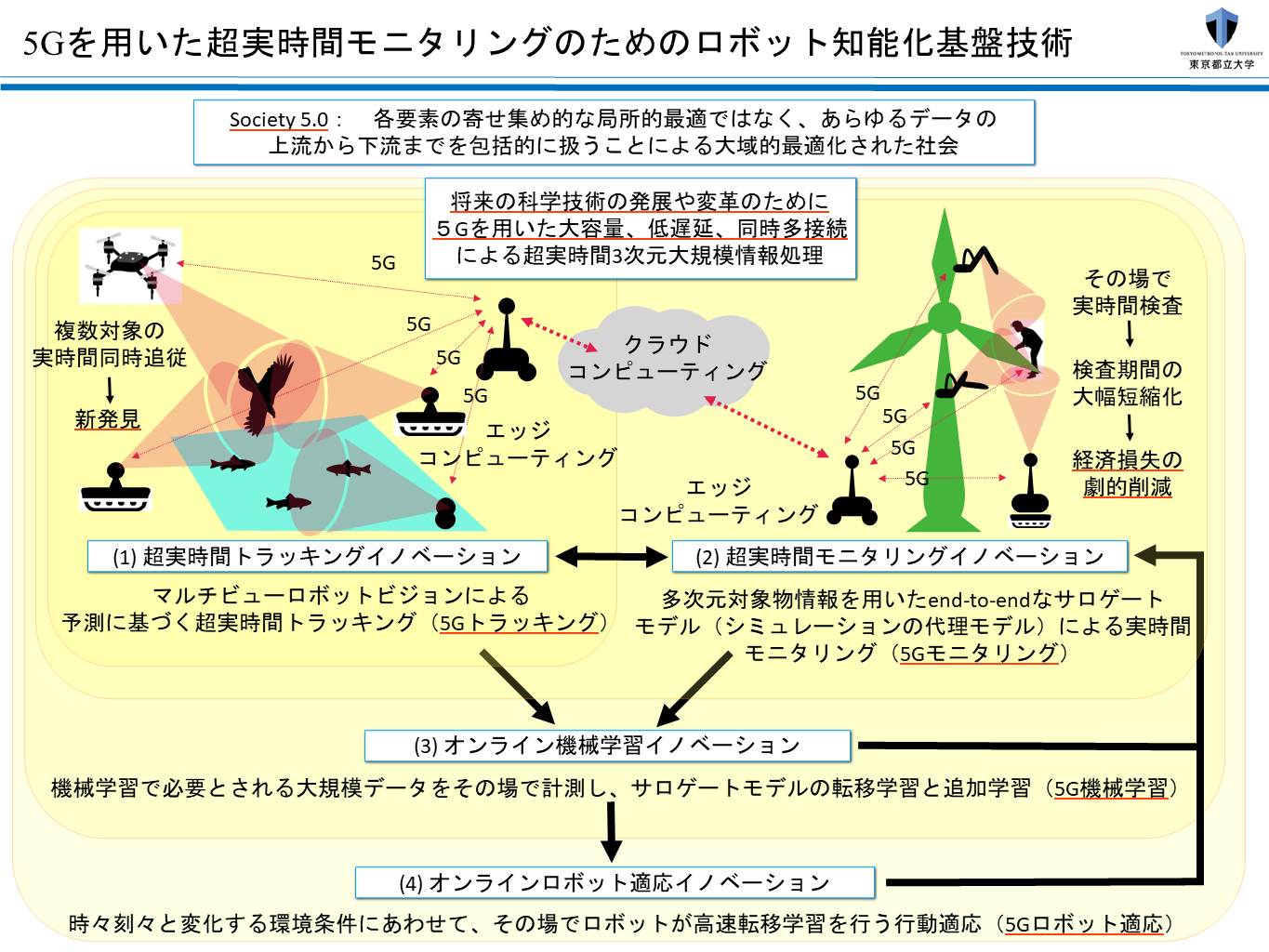
大容量・低遅延、同時多接続の5Gを最大限に活用してSociety 5.0を実現するため、ロボットの高度知能化基盤技術を確立する。
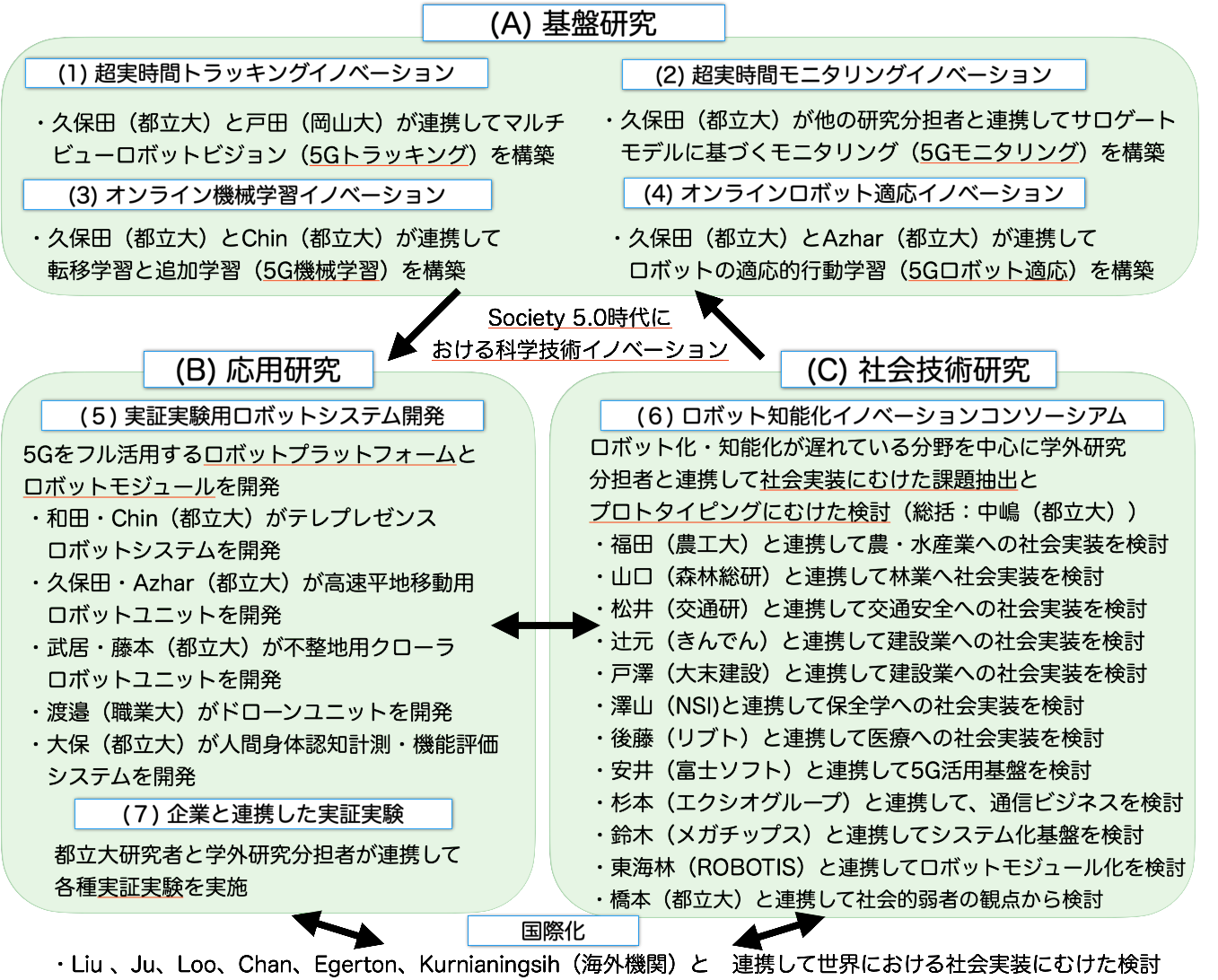
具体的には、①超実時間トラッキングイノベーション(計測)、②超実時間モニタリングイノベーション(認識・予測・推定)、③オンライン機械学習イノベーション(学習)、④オンラインロボット適応イノベーション(適応)の4つの点に関する研究開発を行い、パーソナルモビリティや自動搬送車への展開、林業や建設業の現場における自動化、自律化の実現につなげる。
 【研究業績】
【招待講演】
・Naoyuki Kubota, (Keynote Speech) Topological Twin in Multiscopic Cyber-Physical-Social Systems, – 10th International Conference on MOBILe Wireless MiddleWARE, Operating Systems, and Applications (EAI MOBILWARE 2021), Hohhot, China, Online, October 22-23, 2021.
・Naoyuki Kubota, (Invited Talk) Multiscopic Topological Twin in Robotics, The 28th International Conference on Neural Information Processing (ICONIP2021), Bali, Indonesia, Online, December 8-12, 2021.
・Naoyuki Kubota, (Keynote Speech) Computational Intelligence for Multiscopic Topological Twin, ISCIIA 2022, 2022年9月24日.
・Naoyuki Kubota, (Plenary Talk) Multiscopic Topological Twin in Trailer Living Laboratory, IEEE CINTI 2022, 2022年11月21日.
・Naoyuki Kubota, (Keynote Speech) Topological Intelligence and Topological Twin, ICIST 2022, 2022年12月14日.
・Naoyuki Kubota, Topological Intelligence and Topological Clustering, APNNS/IEEE-CIS Education Forum Series: Deep Learning and Artificial Intelligence Summer/Winter School 2023 (DLAI7)
【受賞】
・ 国際会議 EAI MobilWare 2021 Best Paper Award (2021年)
【共同研究】
事業名:中小企業の5G・IoT・ロボット普及促進事業 公募型共同研究
課題名:5G通信を活用したRaaS制御基盤の開発
期 間: 2022/3から2年間
代表者:リブト株式会社
参画者:きんでん、都立大
概 要:本研究では5G通信の大容量性・低遅延性を活用した、RaaS(Robotics as a Service)制御基盤の開発を行う。
https://www.iri-tokyo.jp/uploaded/attachment/13846.pdf
(都産技研のウェブサイトのリンクです)
【設立趣意書】
【セミナー】
【ロボット知能化基盤技術と5G社会ロゴ】
【研究業績】
【招待講演】
・Naoyuki Kubota, (Keynote Speech) Topological Twin in Multiscopic Cyber-Physical-Social Systems, – 10th International Conference on MOBILe Wireless MiddleWARE, Operating Systems, and Applications (EAI MOBILWARE 2021), Hohhot, China, Online, October 22-23, 2021.
・Naoyuki Kubota, (Invited Talk) Multiscopic Topological Twin in Robotics, The 28th International Conference on Neural Information Processing (ICONIP2021), Bali, Indonesia, Online, December 8-12, 2021.
・Naoyuki Kubota, (Keynote Speech) Computational Intelligence for Multiscopic Topological Twin, ISCIIA 2022, 2022年9月24日.
・Naoyuki Kubota, (Plenary Talk) Multiscopic Topological Twin in Trailer Living Laboratory, IEEE CINTI 2022, 2022年11月21日.
・Naoyuki Kubota, (Keynote Speech) Topological Intelligence and Topological Twin, ICIST 2022, 2022年12月14日.
・Naoyuki Kubota, Topological Intelligence and Topological Clustering, APNNS/IEEE-CIS Education Forum Series: Deep Learning and Artificial Intelligence Summer/Winter School 2023 (DLAI7)
【受賞】
・ 国際会議 EAI MobilWare 2021 Best Paper Award (2021年)
【共同研究】
事業名:中小企業の5G・IoT・ロボット普及促進事業 公募型共同研究
課題名:5G通信を活用したRaaS制御基盤の開発
期 間: 2022/3から2年間
代表者:リブト株式会社
参画者:きんでん、都立大
概 要:本研究では5G通信の大容量性・低遅延性を活用した、RaaS(Robotics as a Service)制御基盤の開発を行う。
https://www.iri-tokyo.jp/uploaded/attachment/13846.pdf
(都産技研のウェブサイトのリンクです)
【設立趣意書】
【セミナー】
【ロボット知能化基盤技術と5G社会ロゴ】

【研究業績】
【招待講演】
・Naoyuki Kubota, (Keynote Speech) Topological Twin in Multiscopic Cyber-Physical-Social Systems, – 10th International Conference on MOBILe Wireless MiddleWARE, Operating Systems, and Applications (EAI MOBILWARE 2021), Hohhot, China, Online, October 22-23, 2021.
・Naoyuki Kubota, (Invited Talk) Multiscopic Topological Twin in Robotics, The 28th International Conference on Neural Information Processing (ICONIP2021), Bali, Indonesia, Online, December 8-12, 2021.
・Naoyuki Kubota, (Keynote Speech) Computational Intelligence for Multiscopic Topological Twin, ISCIIA 2022, 2022年9月24日.
・Naoyuki Kubota, (Plenary Talk) Multiscopic Topological Twin in Trailer Living Laboratory, IEEE CINTI 2022, 2022年11月21日.
・Naoyuki Kubota, (Keynote Speech) Topological Intelligence and Topological Twin, ICIST 2022, 2022年12月14日.
・Naoyuki Kubota, Topological Intelligence and Topological Clustering, APNNS/IEEE-CIS Education Forum Series: Deep Learning and Artificial Intelligence Summer/Winter School 2023 (DLAI7)
【受賞】
・ 国際会議 EAI MobilWare 2021 Best Paper Award (2021年)
【共同研究】
事業名:中小企業の5G・IoT・ロボット普及促進事業 公募型共同研究
課題名:5G通信を活用したRaaS制御基盤の開発
期 間: 2022/3から2年間
代表者:リブト株式会社
参画者:きんでん、都立大
概 要:本研究では5G通信の大容量性・低遅延性を活用した、RaaS(Robotics as a Service)制御基盤の開発を行う。
https://www.iri-tokyo.jp/uploaded/attachment/13846.pdf
(都産技研のウェブサイトのリンクです)
【設立趣意書】
【セミナー】
【ロボット知能化基盤技術と5G社会ロゴ】